GCL学术成果:SIGGRAPH 2026 - G3R:基于格林第三恒等式的无定向点云表面重建
近日,SIGGRAPH 2026 接收成果公布,来自中国科学技术大学数学科学学院 GCL 实验室的陈仁杰研究团队提出了一种面向无定向点云的表面重建方法 G3R。该方法从边界积分方程的角度重新审视绕数类重建方法,指出其不稳定性的理论根源,并通过格林第三恒等式构造出条件更好的线性系统,从而直接求解全局一致的点云法向并重建高质量曲面。
无定向点云表面重建是计算机图形学和几何处理中的基础问题。真实扫描、稀疏采样或自动重建流程往往只能得到点的位置,而没有可靠、一致的外法向。若法向方向局部翻转或全局不一致,后续的 Poisson 重建、隐式曲面提取和网格生成都会受到明显影响,最终表现为表面断裂、孔洞、错误粘连或细节丢失。G3R 的目标正是从这些原始、无组织、无定向的点云出发,稳定恢复全局一致法向,并进一步得到高质量表面网格。

一、绕数方法为什么会不稳定
近年来,基于绕数或高斯公式的无定向点云重建方法取得了重要进展。PGR 和 AGR 等方法将表面上的绕数约束写成线性方程,通过求解未知法向来恢复可用于重建的有向点云。这类方法的优点是形式简洁、具有全局积分视角,但在实际求解中常常会遇到欠定、病态或依赖人工正则化的问题。
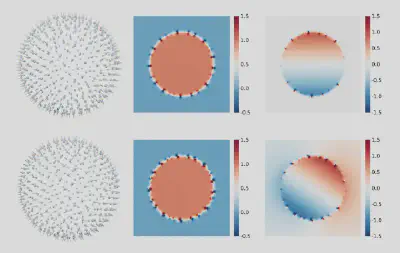
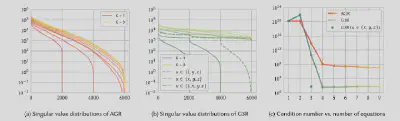
G3R 的一个关键贡献,是解释了这种不稳定性的来源。论文指出,经典绕数公式可以看作格林第三恒等式在常数调和函数 u = 1 上的一个特例。由于只使用这一种函数,绕数算子对一大类切向散度为零的扰动并不敏感。换句话说,一些错误的切向扰动即使改变了法向场,也不会被绕数约束“看见”。这些不可见方向形成了非平凡零空间,使得线性系统条件数变差,进而需要 Tikhonov 阻尼、零初始化等额外正则化技巧来获得可用解。
二、G3R:用格林第三恒等式构造稳定方程
针对上述问题,G3R 不再只使用常数函数上的绕数约束,而是将其推广到多个调和函数上的格林第三恒等式。对于任意调和函数 u,格林第三恒等式都能在边界上给出一组关于未知法向的线性约束。G3R 将多组约束叠加起来,形成一个更充分、更稳定的最小二乘系统。
直观地说,常数函数只能提供一种观察方向,而多个调和函数能够从更多“测试场”中审视同一个法向场。论文证明并通过实验验证,选择 u 属于 {1, x, y, z} 已经能够消除切向零空间;在实际实现中,方法进一步使用最高到二阶的实正则固体调和函数(real regular solid harmonics),共 9 个调和多项式,在稳定性和计算开销之间取得较好平衡。这样得到的法向方程条件数显著下降,可以直接求解,而不再依赖额外正则化。
三、从理论公式到可扩展算法
格林第三恒等式中同时包含单层势(single layer)和双层势(double layer)积分核,直接离散化时会遇到近场奇异性。传统绕数方法常通过截断或裁剪近邻贡献来处理双层势核,但 G3R 的单层势项在近场不具有同样的抵消性质,简单截断会引入偏差。为此,论文采用高斯平滑化,将拉普拉斯基本解中的 Dirac delta 源替换为平滑高斯核,从而消除奇异性并保持边界积分约束的有效近似。
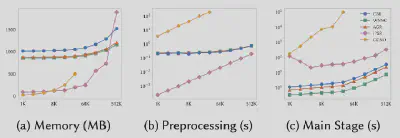
在中等规模点云上,G3R 可以显式组装线性系统并使用直接求解器。面对数十万甚至百万级点云时,完整稠密矩阵会带来不可接受的存储和时间开销。论文因此进一步采用无矩阵迭代求解,并利用八叉树层次结构加速远场核求和,将每次矩阵向量乘法的复杂度从二次量级降低到近似 O(N log N)。这一设计使 G3R 不仅是一个理论上更稳定的公式,也能够在大规模真实数据上运行。
四、实验结果:重建质量、薄结构和真实扫描
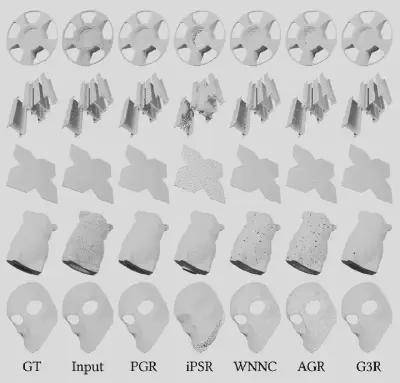
论文将 G3R 与 GCNO、PGR、iPSR、WNNC、AGR 等代表性无定向点云法向定向方法进行了系统比较。实验覆盖 Famous、ABC、Thingi10K 等数据集,并在 50K 均匀采样点云上评估点云法向误差、正确朝向比例、Chamfer 距离、网格法向误差和 Hausdorff 距离等指标。结果表明,G3R 在法向定向上相较积分方程类方法有稳定提升,并在表面网格重建质量上达到最优或接近最优表现。
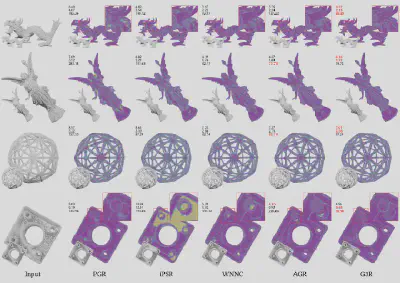
G3R 在薄结构场景中的优势尤为明显。固定点迭代类方法虽然在平均法向指标上表现很强,但在薄片、细杆、窄间隙等局部歧义严重的结构中容易陷入局部错误。G3R 通过直接求解全局积分方程,能够更好地保持薄结构和复杂边界,减少局部法向翻转对最终网格的影响。在加入高斯噪声的合成点云上,G3R 也保持了恢复薄结构的能力。
除常规模型外,论文还测试了复杂拓扑、线框采样和真实扫描等挑战场景。对于由 VR/AR 草图工具常见的低采样线框点云,G3R 仍能完成稳健法向定向并重建表面;对于 Stanford 真实扫描数据,方法在不进行额外预处理的情况下处理了包含 2,246,582 个点的 Armadillo 扫描和 362,272 个点的 Bunny 扫描,并成功得到高质量重建结果。运行开销方面,G3R 由于引入了更多调和函数约束,略高于 WNNC 和 AGR,但明显低于 GCNO 和 iPSR,并可通过 GPU 与八叉树加速处理大规模输入。
五、总结与展望
G3R 的核心意义在于,它不只是提出了一个新的无定向点云重建算法,也重新解释了绕数类方法的数学结构。通过把绕数公式放回格林第三恒等式这一更一般的框架中,论文揭示了原有方法中切向零空间导致的病态问题,并用多个调和函数约束将其消除。由此得到的系统具有更好的数值条件,可以更稳定地求解全局一致法向,并在多类表面重建任务中取得高质量结果。
从应用角度看,G3R 可用于三维扫描数据处理、几何建模、逆向工程、数字内容重建以及 AR/VR 场景中的稀疏点云表面恢复。未来,研究团队还计划进一步结合固定点迭代策略、显式噪声建模和体约束,以提升方法在噪声和离群点更强的真实场景中的鲁棒性。
论文发表
该工作已被计算机图形学顶级国际会议 SIGGRAPH 2026 接收。
论文原文
● 论文标题:Surface Reconstruction from Unoriented Points via Green’s 3rd Identity
● 作者:Zhonghao Wu, Dong Xiao, Renjie Chen
● 单位:中国科学技术大学、上海创智学院
● 项目代码:https://github.com/ne0-wu/G3R
● DOI:10.1145/3799902.3811154