GCL学术成果:SIGGRAPH 2025-大规模参数曲面的直接光栅化
【论文标题】PaRas: A Rasterizer for Large-Scale Parametric Surfaces
【作者】王克淳,陈仁杰*
【单位】中国科学技术大学
背景与问题
参数曲面广泛应用于CAD、工业设计与电影动画制作中,其高精度和紧凑的数学表示使其成为几何建模的重要基础。然而,在现代图形硬件上实时渲染大规模参数曲面仍面临挑战。传统方法往往依赖硬件曲面细分(tessellation),但这类方法在处理复杂场景时性能下降严重,且难以保持几何精度和一致性,特别是在高曲率区域或边界处更容易产生裂缝与失真。此外,基于光线追踪的精确方法虽然能够提供更高的几何保真度,但代价较高,难以在实时系统中使用。
因此,开发一种既具备硬件加速效率又能兼顾曲面精度与一致性的参数曲面光栅化方法,是计算机图形学中一个长期未解决的关键问题。
解决方案
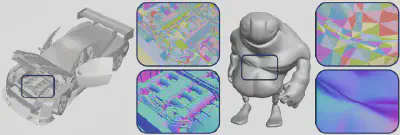
我们提出了一个新的光栅化框架PaRas,通过将每个参数曲面片段视为一个“基本图元”,有效地绕开了传统的细分与构网流程。该方法利用GPU固定功能的硬件光栅器对每个曲面片段构建线性近似,并将片段的(u,v)参数插值写入帧缓冲中。随后,我们使用GPU并行地在屏幕空间中对这些参数进行迭代反求与修复,最终得到高精度的表面点与法线。
特别地,为了解决由线性近似导致的边界裂缝和剪影误差,我们引入了基于屏幕空间的两阶段恢复流程:边界恢复通过查询预存的邻接表,使用相邻片段的参数重新初始化反求过程;轮廓恢复则根据法线与视线夹角筛选潜在误差区域,并扩展三角片以保证轮廓边界附近的采样完整性。这种设计极大提升了曲面拼接的一致性和剪影的连贯性。
实验结果
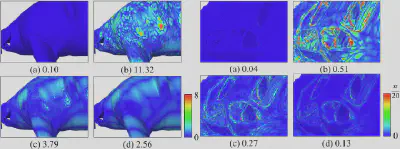
我们在包含三次有理Bézier曲面与四次三角Bézier曲面的多个真实模型上验证了方法的有效性。在配备的主流的GPU的平台上,我们的系统达到了实时性能,并且在几何误差与法线误差上均显著优于传统基于硬件细分的管线。
图片分别展示了我们方法在像素级几何精度与法线保真度上的表现。我们还进一步与多个层次的细分因子(4、8、64)进行了对比,结果表明在不引入大量额外几何的前提下,我们的方法依然维持亚像素精度。
技术贡献
在这项工作中,我们的贡献主要包括:
- 提出了一种结合硬件光栅化与屏幕空间反求的参数曲面渲染框架,突破了传统细分方法的效率瓶颈。
- 在无需构建中间网格的情况下,实现了在工业复杂曲面上具有高精度的实时渲染。
论文发表
该工作已被计算机图形学顶会SIGGRAPH 2025接收(conference track)。
论文原文
Kechun Wang, Renjie Chen. PaRas: A Rasterizer for Large-Scale Parametric Surfaces. In ACM SIGGRAPH 2025 Conference Proceedings, 2025.