GCL学术成果:SIGGRAPH 2026-Coordinate-Motion Assemblies:协同运动装配的结构体设计
近日,SIGGRAPH 2026 接收成果公布,来自中国科学技术大学数学科学学院 GCL 实验室的卢俞锟同学、陈柯同学、刘利刚老师,与新加坡科技设计大学宋鹏老师合作的论文 Computational Design of Coordinate-Motion Assemblies 被 SIGGRAPH 2026 Conference Papers 接收。
该文研究协同运动装配的结构体设计,能够设计具有高稳定性的结构体。论文建立了装配体接触几何与唯一协同运动之间的理论联系,并实现了符合目标形状与协同装配要求的可制造零件设计与验证,从而完成具有高稳定性的协同运动装配体的计算设计。
不同于常见的“一个零件接一个零件”拆装方式,协同运动装配体只能通过多个零件沿不同路径同时运动完成拆解或装配。这一性质使结构体在日常扰动下更不容易松散,也使机器人有机会通过同步操作一次性完成复杂装配。本文提出的计算设计方法,使用户能够给定目标整体形状和期望的协同运动方向,自动生成既符合外观形状、又只能沿指定协同运动拆解的可制造零件。
视频展示了文章的研究背景,研究方法和实验结果
一、协同运动装配体:从顺序拆装到同步运动
大多数装配体可以按顺序拆解:先取出一个零件,再取出下一个零件,直到整体分离。协同运动装配体则不同。它要求多个零件同时沿各自路径运动,任意只移动其中一两个零件都无法完成拆解,因此其装配和拆解过程天然具有非顺序性;如图1。
这种非顺序性带来了三方面优势。首先,由于结构的分离需要多个零件同时配合,装配体具有更高的结构稳定性,不容易因单个零件受力而散开。其次,协同运动也适合机器人装配场景。多个机械臂可以同时操控不同零件,在一次同步操作中完成装配,提高复杂结构的装配效率。最后,由于拼装需要协同运动,仅靠两只手完成装配需要更高的技巧,因此这样的装配体适用于智力机械谜题。
协同运动装配体因此在建筑结构、机器人装配和机械谜题中都有潜在价值。然而,这类结构的设计并不容易。设计者不仅要决定每个零件的形状,还要保证这些零件在空间接触后只允许目标协同运动,排除其他可能的拆解方式。

二、现有设计的难点:如何建立形状、接触与唯一协同运动的理论关系
已有协同运动装配体的设计往往依赖经验试错或构造局部关节。机械谜题设计中,设计者通常通过组合球体、四面体等简单基元反复尝试,能够得到有趣结构,但形状自由度和运动多样性有限。建筑结构中常使用榫卯等关节连接来实现协同运动,但当目标整体形状具有曲面或薄壁特征时,关节长度和宽度会受到很大限制,导致连接较弱,在实际中难以应用。
更根本的问题在于:协同运动装配体的稳定性来自零件之间的接触几何,而不是某一个简单关节。对于基于接触的结构,两个零件之间往往存在多个可能的相对运动方向。如果只保证“可以沿目标方向拆开”,并不能保证“只能沿目标方向拆开”。换言之,设计目标不是找到一个可行运动,而是保证唯一协同运动。
因此,本文关注一个关键问题:能否从理论上刻画装配体接触几何与唯一协同运动之间的关系,并据此自动生成符合目标形状和制造约束的协同运动装配体?
三、核心思想:用接触几何约束唯一协同运动
本文首先从理论上分析零件接触与运动之间的关系。对于一个给定的目标协同运动,零件间的接触可以分为三类:滑动接触、分离接触和阻挡接触。
滑动接触是在目标运动过程中仍保持接触并相互滑动的接触面,它们决定了零件能否沿指定方向稳定移动。分离接触会在目标运动开始时自然分开,不会阻碍拆解。阻挡接触则会阻止不符合目标方向的其他运动。三类接触共同决定装配体是否只能沿目标协同运动拆解。
基于这一观察,论文建立了装配体接触几何与唯一协同运动之间的理论联系,并提出了验证算法:给定一个装配体,可以判断它是否具有唯一协同运动。这一理论结果把原本依赖经验的结构判断,转化为可以计算和验证的几何条件,为后续自动设计奠定基础。
四、方法框架:从目标形状到可制造零件
在计算设计阶段,用户输入目标整体形状,以及每个零件期望的运动方向。方法不直接在最终复杂网格上搜索,而是将问题分为两个阶段:先设计满足唯一协同运动条件的接触界面,再生成符合目标形状与制造要求的完整零件。
第一步是初始化接触模型。方法在目标形状内部放置参考球,并根据用户指定的零件运动方向划分参考球,从而确定零件之间的邻接关系和初始接触界面。这一步提供了一个与目标形状无关、但与协同运动方向相关的初始结构。
第二步是运动学设计。方法用参数化的平面接触片表示滑动接触,优化这些接触片的位置、方向和数量,使其满足唯一协同运动的理论条件。由于这一阶段只处理抽象接触模型,不需要频繁构造完整实体零件,因此可以更高效地搜索可行设计。
第三步是几何实现。方法将优化得到的接触界面与目标整体形状结合,生成每个零件的封闭实体几何。同时,系统会处理实际制造中的常见问题,包括保证每个零件连通、避免零件之间碰撞、修复过薄或脆弱结构,并在最终生成后再次验证其唯一协同运动性质。
总结来说,本文方法把协同运动装配体设计拆解为“接触几何优化”和“可制造几何生成”两个相互配合的过程,从而同时满足目标形状、唯一协同运动和物理可制造性。

五、实验结果:复杂形状、多零件结构与实物验证
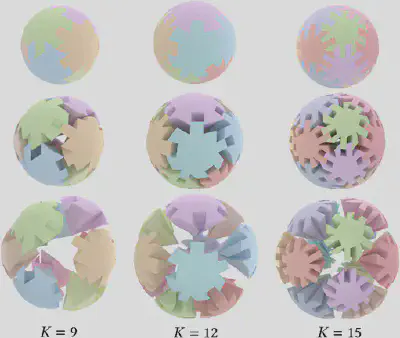
实验表明,本文方法能够处理多种具有挑战性的目标形状;如图3。更多结果请参考论文:包括复杂曲面模型、带有深凹区域的模型、具有尖锐特征的建筑模型,以及高亏格拓扑结构。方法还可以扩展到较多零件数量的结构,例如生成具有 15 个零件的球形协同运动装配体,并保持唯一协同运动性质;如图4。

与基于关节的设计相比,本文的接触式设计可以更充分地利用零件之间的整体接触界面。在图5示例中,传统关节受圆形整体形状和薄壁结构限制,只能形成较短、较窄的连接;而本文方法使用全局接触界面,获得更大的滑动接触面积,并避免细弱关节带来的结构问题。

为了验证物理可行性,论文使用 SLA 3D 打印制作了多个实物原型;如图6。实验结果显示,这些原型均可成功装配,并且需要按照设计好的协同运动才能拆解。对于球体和南瓜等示例,原型在稳定性测试中保持完整,说明设计不仅在虚拟模型中满足运动约束,也能够在真实制造后体现出较好的结构稳定性。

六、总结与展望
本文提出了协同运动装配体的计算设计框架。该框架建立了装配体接触几何与唯一协同运动之间的理论联系,并在此基础上优化接触界面,进一步生成符合目标形状、协同装配要求和制造约束的可制造零件。
这一工作使协同运动装配体从经验式设计走向可计算、可验证和可制造的自动设计流程。未来,该方向可以进一步结合有限位移过程中的鲁棒性分析、物理力与力矩稳定性分析,以及摩擦等实际因素建模,从而面向建筑结构、机器人装配和机械功能结构等应用,设计更可靠、更复杂的高稳定性结构体。
论文发表
该工作已被计算机图形学顶级国际会议 SIGGRAPH 2026 接收。
论文原文
● 论文标题:Computational Design of Coordinate-Motion Assemblies
● 作者:Yukun Lu, Ke Chen, Ligang Liu, Peng Song
● 单位:中国科学技术大学、新加坡科技设计大学、崂山实验室
● 项目主页:https://sutd-cgl.github.io/supp/Publication/projects/2026-SIGGRAPH-CoordinateMotion/index.html