GCL学术成果:SIGGRAPH 2026-mpcGear: 多点共轭齿轮机构
近日,SIGGRAPH 2026 接收成果公布,来自中国科学技术大学的刘利刚研究团队,联合新加坡科技设计大学、南洋理工大学和崂山实验室的研究团队提出了一种新的齿轮机械结构——多点共轭齿轮机构(multi-point conjugation gear mechanism, mpcGear)。该机构可建模为一对具有多个共轭点的共轭曲面,能够在有外部负载的情况下生成用户指定的三维运动。
该文提出了一种基于优化的齿轮几何设计方法,将复杂运动信息直接编码到齿轮几何中,使齿轮在保持良好承载能力的同时,突破传统齿轮主要用于简单转动传递的限制。实验结果表明,mpcGear 不仅能够生成多种高自由度三维运动,还在承载能力上显著优于此前的多点共轭机构设计。

一、从传统齿轮到复杂三维运动生成
齿轮通过轮齿啮合传递旋转运动,是机械系统中最基础也最重要的部件之一。最常见的圆齿轮通常用于实现恒定速比的转动传递,而非圆齿轮则可以实现变速传动。尽管齿轮在效率、紧凑性和承载能力方面具有天然优势,但它们生成运动的能力长期受到限制,通常更擅长把一个1-自由度的旋转运动传递给另一个1-自由度的旋转运动。
当系统需要输出更复杂的运动时,齿轮往往需要与连杆、凸轮从动件、皮带等其他机械构件组合使用。这类复合机构虽然能够扩展运动生成能力,但也常常带来体积增大、结构复杂、制造装配误差累积以及传动效率下降等问题。
近年来,研究者开始探索非常规齿轮,希望在保留齿轮紧凑布局、高传动效率和良好承载能力的同时,生成更丰富的运动。例如,已有工作研究了能够同时产生转动与轴向平移的非圆锥齿轮、球面齿轮以及用于空间运动传递的特殊齿轮系统。mpcGear 正是在这一研究脉络上进一步推进的一项工作,其目标是让单对齿轮在单个电机的驱动下,能够生成用户指定的三维刚体周期运动,同时保持齿轮的高承载特性。
二、核心挑战:既要生成复杂运动,又要承受外部负载
为了实现这一目标,论文需要同时解决两个关键问题。首先,如何构造一对可制造的齿轮曲面,使它们在整个运动过程中始终保持多个共轭接触点。传统齿轮通常围绕单一啮合关系展开设计,而 mpcGear 需要在连续运动中维持多点接触,这对几何建模提出了更高的要求。其次,如何量化这类机构在外部负载下的工作能力。仅仅能够“动起来”并不够,如果齿轮在承受负载后无法继续稳定传递运动,那么它在实际应用中的价值将非常有限。为此,论文将“动态形封闭”作为核心理论基础,并进一步提出其度量形式,用于定量评估机械结构的承载性能。换句话说,mpcGear 不只是追求运动学上的可行,还希望在工程意义上具备在负载作用下稳定工作的能力。
三、方法框架:从齿对到完整齿轮机构的优化建模
论文采用了一种自底向上的建模思路,逐步从局部接触几何扩展到完整的齿轮机构。
- 建模单个齿副
首先,论文先建模单个齿副。每个齿副由一对开口的三维共轭曲线及其法向组成,并且只在运动周期的一个时间子区间内保持接触。相较于过去研究的基于闭合曲线的设计,这种开口共轭曲线的表达更加灵活。
- 将多个齿副组织为一个子齿轮副
接下来,多个齿副被组合成一个子齿轮副。每个齿副负责整个周期中的一个时间子区间,多个子区间首尾衔接并适度重叠,从而保证在整个运动周期内都能持续传递运动。同时,优化中还加入了若干几何约束,用于保证齿副之间具有足够间距、整体排布紧凑且满足可制造性要求。
- 用多个子齿轮副实现多点共轭
论文进一步同时建模多个子齿轮副,使它们在整个运动过程中共同满足动态形封闭条件,以保证连续的运动传递。根据理论分析,若希望在一个 N-自由度运动空间中实现稳定传动,至少需要 N+1 个共轭点。论文中的优化算法从这一理论下界出发,逐步搜索满足条件的最紧凑设计。同时,论文的一个核心贡献,是将“动态形封闭”从一个判断条件进一步推广为一个可量化的指标。这个动态形封闭度量不仅能够判断机构能否在整个周期内连续传递运动,还能够衡量在不同姿态下抵抗外部有效负载的能力。优化过程因此不再只是追求能够生成运动的齿轮几何,而是进一步搜索在动态形封闭度量上表现更优的齿轮几何;更好的承载能力则来自这些几何本身。
- 最终建模完整的齿轮机构
完成优化后,论文将得到的三维共轭曲线及其法向转化为齿面,再加入中心轮毂、连接辐条、支撑件以及相应关节,最终构建出完整、可制造的 mpcGear 结构。

四、实验结果:既能精确生成运动,也有更强承载能力
论文从运动生成能力、物理原型验证、与已有方法的承载能力对比以及应用展示四个层面验证了方法的有效性。
- 能够建模多类生成不同自由度运动的齿轮机构
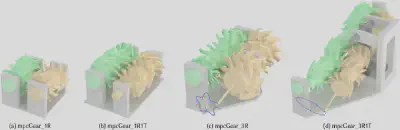
论文建模了四类 mpcGear,覆盖从低自由度转动到高自由度空间运动的多种情形。实验表明,随着运动所在的运动空间的自由度提高,所需的子齿轮副数量也会增加,但对于同一运动空间,mpcGear 往往比此前的 mpcMech 需要更少的共轭点,从而具有更紧凑的实现潜力。
- 3D 打印原型验证了运动生成能力
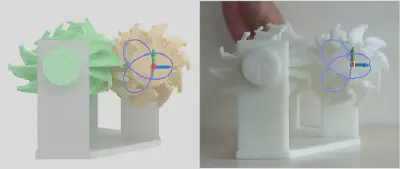
为了验证运动学性能,论文设计并3D打印了一个 mpcGear_3R 原型,使末端执行器沿球面上的三叶结(Trefoil)轨迹运动,并伴随姿态变化。实验中,研究者通过图像跟踪记录末端轨迹,结果表明,物理原型生成的轨迹与渲染结果整体吻合良好,说明 mpcGear 能够作为实际可工作的机构稳定运行。
- 与 mpcMech 相比,承载性能显著提升
论文进一步将 mpcGear 与已有的多点共轭机构 mpcMech 进行了比较。结果表明,在相同的3-自由度旋转运动任务下,基于开口三维共轭曲线构建的 mpcGear ,比基于闭合三维共轭曲线构建的 mpcMech 具有更好的承载能力。

- 应用展示:仿生扑翼
论文展示了一个扑翼机构作为应用案例。论文使用一对 mpcGear_3R 生成对称的鸟类式扑翼运动,表明这类齿轮机构也有希望扩展到涉及气动力载荷的运动系统中。
五、总结与展望
mpcGear 提出了一条不同于传统齿轮设计的新路径:它不再把齿轮仅仅视为简单转动传递构件,而是将复杂三维运动直接编码进齿轮几何之中。通过多点共轭建模、动态形封闭度量评估和可制造约束,论文展示了一类能够在外部负载下精确生成复杂运动的新型非常规齿轮机构。从研究意义上看,这项工作拓展了齿轮机构的表达边界;从应用角度看,它也为低成本机器人、空间运动生成机构和仿生机械系统提供了新的设计思路。
论文发表 该工作已被计算机图形学顶级国际会议 SIGGRAPH 2026 接收。
论文原文
● 论文标题:mpcGear: Multi-Point Conjugation Gear Mechanisms:
● 作者:Ke Chen, Joshua John Shi Kai Lee, Jianmin Zheng, Ligang Liu, Peng Song
● 单位:中国科学技术大学,新加坡科技设计大学,南洋理工大学,崂山实验室
● 项目主页:https://sutd-cgl.github.io/supp/Publication/projects/2026-SIGGRAPH-mpcGear/index.html