GCL学术成果:11篇论文被顶会SIGGRAPH 2026录用
近期,GCL实验室在计算机图形学领域取得了系列重要研究进展。有11篇论文被图形学领域顶级会议Siggraph 2026录用,其中2篇论文被Journal Track录用,将发表在该领域唯一的一区TOP期刊ACM Transactions on Graphics上,另9篇论文被Conference Track录用。所有论文将2026年7月19日-23日在美国洛杉矶举行的Siggraph 2026会议上进行宣读。
第一篇论文
李劲同学、付一航同学,陈发来老师合作的论文“BrepForge: Factorized B-rep Synthesis via Wireframe Composition and Boundary-Conditioned Surface Instantiation"。该论文针对基于边界表示(B-rep)的三维 CAD 模型生成任务中拓扑结构与几何信息高度耦合、难以稳定生成的问题,提出了一种分解式 B-rep 生成框架 BrepForge。该方法基于对 B-rep 内在结构特性的观察,将复杂的 B-rep 合成过程划分为“线框拓扑生成”与“边界约束曲面实例化”两个阶段。在第一阶段,论文提出一种面感知的自回归生成模型,通过显式编码 Vertex–Edge–Face(V–E–F)层次连接关系,将 B-rep 线框结构序列化为具有拓扑语义的生成序列,从而生成拓扑完整的线框骨架。相比传统方法直接联合生成拓扑与几何信息,该方法能够更有效地处理复杂拓扑结构。在第二阶段,论文进一步利用边界环对曲面内部几何的天然约束,引入无需学习的几何先验,实现边界约束下的精确曲面实例化,将原本困难的几何生成问题转化为结构化的曲面细化过程。该分解式框架有效保证了生成结果的拓扑合法性与几何精度,在复杂 CAD 模型生成任务中表现出更高的几何复杂度与拓扑有效率。大量实验结果表明,BrepForge 在生成质量与有效性方面均显著优于现有方法。

第二篇论文
赵彧同学、陈仁杰老师的论文“Nonlinear Multigrid for Injective Embedding提出了一种为生成单射且无翻转的单纯复形嵌入,高效优化总提升面积(Total Lifted Content)能量的非线性多重网格(MG/Opt)框架。该方法利用拓扑保持的网格层次结构在粗尺度上快速消除低阶误差,同时通过线性修正项维持层次间的严格梯度一致性。针对局部翻转这一挑战,文中引入了定向平滑策略与自适应参数退火机制,在全局收敛速度与局部单射精度之间取得平衡。本文在二维和三维基准数据集上的实验验证了方法的鲁棒性。

第三篇论文
胡智豪同学、陈仁杰老师合作的论文“PQ-Free HD: Priority-Queue-Free Hausdorff Distance for Triangle Meshes on GPU”。该论文提出了一种面向三角网格的可控容差Hausdorff距离GPU并行计算框架,通过松弛化的剪枝准则解耦了算法的终止逻辑与任务调度顺序,将传统状态依赖型串行搜索转变为高吞吐量的异步批处理模式,实现了三角网格间高效且严格误差保证的Hausdorff距离计算。相比传统基于全局优先级队列的串行分支定界方法,该方法避免了全局同步瓶颈与串行开销,通过批量深度优先调度与融合协作内核设计释放GPU并行算力,提升了计算效率;同时采用紧凑的过程式任务描述符,大幅压缩单个任务的显存占用,使得固定显存预算下可容纳大规模任务并发执行。针对边界归属歧义以及CAD模型密集共面簇引发的搜索空间爆炸问题,本文新增了影响集测试与平面覆盖测试两个几何剔除环节,有效遏制了任务量膨胀。凭借该计算框架,可以实现严格容差可控的Hausdorff距离查询,并支持完全在GPU上运行、具有严格误差控制的网格简化等精度关键任务。
第四篇论文
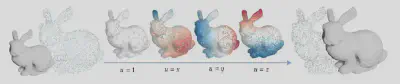
吴中昊同学、肖冬老师、陈仁杰老师的论文“Surface Reconstruction from Unoriented Points via Green’s 3rd Identity”。该论文针对无定向点云表面重建中法向方向难以全局一致、现有绕数方法容易产生欠定或病态线性系统的问题,提出了一种基于格林第三恒等式的表面重建方法 G3R。无定向点云广泛来自三维扫描、重建和几何处理流程,但由于缺少一致法向,后续的隐式曲面重建往往容易出现孔洞、翻转或细节缺失。现有 PGR、AGR 等基于绕数或高斯公式的方法虽然具有优雅的积分表达,但论文从边界积分方程角度指出:绕数公式本质上只是格林第三恒等式在常数调和函数上的特例,它对一大类切向扰动不敏感,从而在法向求解中引入非平凡零空间,导致系统条件数差并依赖额外正则化。为解决这一问题,G3R 将绕数约束推广为格林第三恒等式在多个调和函数上的约束。每个调和函数都会给未知法向提供一组线性方程,将这些方程堆叠后即可构造条件良好的最小二乘系统,并直接求解全局一致法向。论文进一步采用高斯平滑化处理基本解,以稳定处理积分核的近场奇异性;同时结合无矩阵迭代求解和八叉树加速,使方法能够扩展到大规模点云。实验表明,G3R 在 Famous、ABC、Thingi10K 等数据集上取得了具有竞争力的法向定向精度和最优或接近最优的网格重建质量,并在薄结构、线框采样、复杂拓扑以及 Stanford 真实扫描点云等挑战场景中保持稳定表现。该工作为基于边界积分的无定向点云重建提供了更稳定、可扩展的新思路。
第五篇论文
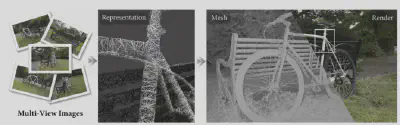
崔晋恺同学、宋凯文同学、牛楚蒙同学与张举勇老师的论文“Distance Field Rasterization for End-to-End Mesh Reconstruction”。该论文提出了一种面向多视角三维重建的全新方法——SDFRaster。该方法围绕高质量网格重建中的三维曲面表达、渲染效率与端到端优化问题,提出了一种可光栅化的符号距离场表达,将 Signed Distance Field(SDF)的连续几何表达能力与光栅化渲染的高效优化机制相结合,实现了从多视角图像到高质量网格模型的端到端重建。 不同于依赖深度融合、TSDF 融合或其他启发式后处理步骤的表面重建方法,SDFRaster 将场景表示为定义在 Delaunay 四面体网格上的连续符号距离场,并通过四面体光栅化完成高效可微渲染。同时,该方法在优化过程中集成可微 Marching Tetrahedra,使最终网格能够直接参与训练约束,从而缩小图像渲染目标与表面重建目标之间的差距。
项目主页:https://ustc3dv.github.io/SDFRaster/
第六篇论文
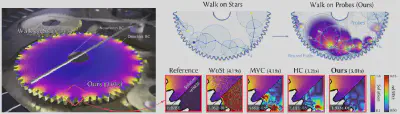
黄万超同学、朱雨田同学、方清老师与刘利刚老师的论文“Probe-based Walk on Spheres for Efficient Path Reusing”。该论文针对 Walk on Spheres (WoS) 算法收敛速度慢、难以满足高精度求解需求的问题,提出了一种基于路径重用的方差缩减框架 Walk on Probes (WoP)。核心洞察源于 WoS 过程的马尔可夫性质:单条随机游走轨迹上的每一个中间点,理论上都可构成对起点的无偏估计。然而,标准 WoS 动态生成球体的方式导致路径点的分布极其复杂,使得直接重用这些中间估计变得不可行。为此,本文用一组预布置在区域内的固定球探针替代动态球体,将游走过程转变为在探针边界间的跳跃,从而把路径点的复杂分布转化为固定边界上的采样,并可利用泊松积分公式进行高效的解场重构。在此基础上,本文进一步提出了融合控制变量与自归一化的专用估计器,有效压制了探针估计的方差。相比将 WoS 视为黑盒求解器的传统缓存方法,该方法首次深入挖掘了随机游走轨迹内部的结构信息,在完全保留无网格、局部求解和天然可并行等灵活性的前提下,大幅提升了样本效率,实现了数量级的方差缩减。
第七篇论文
陈柯同学、刘利刚老师,新加坡科技设计大学的Joshua Lee同学、宋鹏老师,南洋理工大学的郑建民老师合作的论文“mpcGear: Multi-Point Conjugation Gear Mechanisms”。该论文设计出了一种基于多点共轭的齿轮机械结构,能够在有外部负载的情况下生成用户指定的三维运动。齿轮通过轮齿之间的啮合传递旋转运动。其中,圆齿轮通常用于生成匀速转动,而非圆齿轮则能够生成变速转动。为了生成复杂的运动,齿轮通常需要与连杆机构、凸轮从动件和皮带等其他机械构件组合使用,然而这往往会导致结构复杂并且传动效率降低。为了解决这些局限,近年来的研究开始探索一些非传统形状的齿轮,使其在保持紧凑、高传动效率和良好承载能力等关键特性的同时,还能够生成复杂运动。该文所提出的新型齿轮机构,称为多点共轭齿轮机构,可在外部负载作用下精确生成用户指定的三维运动。该机构仅包含一对建模为一对具有多个共轭点的共轭曲面的齿轮。该文提出了一种基于优化的方法来设计这种新型齿轮机构,该方法通过构建多个满足多点共轭和可制造性要求的子齿轮副来完成设计,并利用动态形封闭度量来量化其承载性能。该文通过建模多种能够生成不同类型运动的多点共轭齿轮机构、借助3D打印原型评估其运动学性能和承载性能、展示两个应用实例来验证该方法的有效性。

项目主页:https://sutd-cgl.github.io/supp/Publication/projects/2026-SIGGRAPH-mpcGear/index.html
第八篇论文
卢俞锟同学、陈柯同学、刘利刚老师与新加坡科技设计大学宋鹏老师合作完成论文“Computational Design of Coordinate-Motion Assemblies”。该论文提出了一种协同运动装配体的计算设计方法,能够根据用户给定的目标整体形状和期望协同运动方向,自动生成符合要求且可制造的结构体。本文建立了装配体接触几何与唯一协同运动之间的理论联系,并提出验证算法判断装配体是否只能沿指定协同运动拆解。在此基础上,方法通过优化零件间的接触界面确保目标协同运动的唯一性,进一步生成满足连通性、无碰撞和抗脆弱性等制造约束的可制造零件。相比依赖经验试错或局部关节的传统设计,该方法能够充分利用零件之间的全局接触界面,更好地适应复杂形状、不同拓扑和多零件结构。实验中,作者在多种三维模型上生成了协同运动装配体,并通过 SLA 3D 打印原型验证了设计结果的可制造性、协同拆解运动和结构稳定性。

项目主页:https://sutd-cgl.github.io/supp/Publication/projects/2026-SIGGRAPH-CoordinateMotion/index.html
第九篇论文
高凡同学、赵艺博同学、蔡有城老师、刘利刚老师合作的论文 “Mobile3DGS³: Accelerate Mobile 3DGS Rendering via Gradient-Aware Super-Sampling and Frame Interpolation”。该论文提出了一种面向移动端3DGS的渲染加速框架 Mobile3DGS³。不同于现有方法主要围绕高斯裁剪或渲染管线优化展开,该方法从后处理视角出发,联合利用超分辨率与插帧技术,在低分辨率渲染结果基础上重建高分辨率、高帧率图像,以降低移动设备上的3DGS渲染开销。论文提出了一种切空间梯度缓存(TSGC)机制,将3DGS渲染图像解析梯度转化为可缓存的切空间不变量,并与移动端硬件光栅化流程兼容,从而支持任意视角下的高效梯度生成与重采样。在此基础上,方法进一步设计了基于梯度感知的超分模块(GASS)与基于梯度感知的插帧模块(GAFI),分别利用图像梯度、几何信息与时序特征实现高质量图像重建与中间帧合成。同时,论文还提出了一种运动向量超分策略(MVSS),以缓解低分辨率运动估计带来的边缘混叠问题。该方法在保持较高视觉质量的同时,有效实现移动端3DGS渲染加速,并且能够与现有硬件光栅化管线无缝兼容,为移动设备上的高效3DGS渲染提供了一种新的加速范式。

第十篇论文
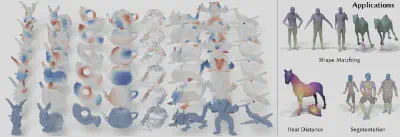
杨哲睿同学、刘利刚老师与清华大学杜韬老师合作的论文"Learning Laplacian Eigenspace with Mass-Aware Neural Operators on Point Clouds"。该论文提出神经网络特征空间算子NEO,用于加速点云上Laplace-Beltrami算子的低频特征分解。LBO低频特征谱在谱几何处理、形状匹配等任务中应用广泛,但传统迭代求解器需对每个模型单独求解大规模稀疏广义特征值问题,计算开销大。NEO将这一问题转化为神经网络前馈推理:不同于逐特征向量回归存在符号翻转与旋转歧义,NEO直接学习数学上唯一确定的低频谱不变子空间,输出冗余基函数鲁棒覆盖目标特征空间,再通过Rayleigh-Ritz精细化重构精确特征对。针对点云非均匀采样,方法设计质量感知注意力机制,将逐点面积权重注入交叉注意力聚合,使网络近似连续积分算子,从而实现低分辨率训练、高分辨率推理的零样本泛化,在51万点规模下相较传统方法获得近90倍加速。此外,预测的低频基函数可直接作为点级特征服务于下游少样本分类与分割任务。
项目主页:https://adversarr.github.io/NEO/
第十一篇论文
刘利刚老师与香港科技大学(广州)的孟恒宇同学、王泽宇老师及腾讯的尹英达,朱灵挺,胡泽宇,王鑫合作的论文“InvSculpt: Inverse Sculpting Modeling via Controlled 3D Generation and a Vector Displacement Field ”。逆向雕刻建模旨在将雕刻网格拆解为基础本体形状与可复用几何细节,让非专业使用者也能复用专业雕刻成果。该论文提出一种新的逆向雕刻框架 InvSculpt,可把雕刻网格分解为高保真基础形状,并以矢量位移场表征可复用几何细节。该方法融合文本引导二维图像编辑的语义先验与三维整流流模型,实现无掩码逆向细节去除,复原出保留原始网格特征的基础形体。为无损、可迁移地刻画雕刻细节,算法在复原后的基础模型表面提取矢量位移场,并构建具备几何感知能力的连续神经表征,支撑细节迁移。实验表明,InvSculpt 的网格拆解质量相较现有方法大幅提升,可适配几何重构、高保真几何细节迁移等多种应用场景。
祝贺GCL实验室各位老师和同学及合作者!
论文信息
- Jing Li, Yihang Fu, Falai Chen. BrepForge: Factorized B-rep Synthesis via Wireframe Composition and Boundary-Conditioned Surface Instantiation. In ACM SIGGRAPH 2026 Conference Proceedings, 2026.
- Yu Zhao, Renjie Chen.Nonlinear Multigrid for Injective Embedding.In ACM SIGGRAPH 2026 Conference Papers, 2026.
- Zhihao Hu,Renjie Chen. PQ-Free HD: Priority-Queue-Free Hausdorff Distance for Triangle Meshes on GPU. ACM Transactions on Graphics (SIGGRAPH 2026), Vol. 45, No. 4, Article 48, July 2026.
- Zhonghao Wu, Dong Xiao, Renjie Chen. Surface Reconstruction from Unoriented Points via Green’s 3rd Identity. In ACM SIGGRAPH 2026 Conference Papers, 2026.
- Jinkai Cui,Kaiwen Song,Chumeng Niu,Juyong Zhang.Distance Field Rasterization for End-to-End Mesh Reconstruction.In ACM SIGGRAPH 2026 Conference Proceedings, 2026.
- Wanchao Huang, Yutian Zhu, Qing Fang, Ligang Liu. Probe-based Walk on Spheres for Efficient Path Reusing. In ACM Trans. Graph.,Vol. 45, No.4, Article 129. Publication date:July 2026.
- Ke Chen, Joshua John Shi Kai Lee, Jianmin Zheng, Ligang Liu, Peng Song. mpcGear: Multi-Point Conjugation Gear Mechanisms. In ACM SIGGRAPH 2026 Conference Proceedings, 2026.
- Yukun Lu,Ke Chen, Ligang Liu,Peng Song. Computational Design of Coordinate-Motion Assemblies.SIGGRAPH 2026, conference paper
- Fan Gao, Zibo Zhao, Changhao Song, Jiarui Wen, Yuxuan Song, Youcheng Cai, Ligang Liu. Mobile3DGS³:Accelerate Mobile 3DGS Rendering via Gradient-Aware Super-Sampling and Frame Interpolation. In ACM SIGGRAPH 2026 Conference Proceedings, 2026.
- Zherui Yang, Tao Du, and Ligang Liu. 2026. Learning Laplacian Eigenspace with Mass-Aware Neural Operators on Point Clouds. In SIGGRAPH Conference Papers, 2026.
- Hengyu Meng, Lanjiong Li, Zhijing Shao, Yingda Yin, Lingting Zhu, Zeyu Hu, Xin Wang, Ligang Liu, Zeyu Wang.InvSculpt: Inverse Sculpting Modeling via Controlled 3D Generation and a Vector Displacement Field.SIGGRAPH Conference Papers (Proc. SIGGRAPH), 2026.