GCL学术成果:CVPR 2026-DualReg:双空间联合优化,实现高效精准的全局点云配准
近日,CVPR 2026接收成果出炉,中国科学技术大学数学科学学院GCL实验室张举勇研究团队提出全新点云刚性配准方法——DualReg,通过设计特征空间与局部几何空间的双空间联合优化框架,成功将CPU端的点云全局配准速度提升一个数量级以上,并刷新了多项精度记录(如图1所示),为实时SLAM、自动驾驶、三维重建等三维视觉应用场景提供了新的解决思路。

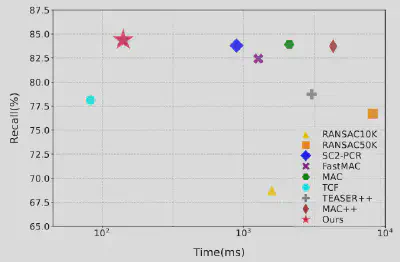
图1:DualReg在精度与速度上的性能表现。
一、点云刚性配准困局:全局精准对齐与效率难以“共存
点云刚性配准的核心在于求解最优的刚性变换(包括旋转变换与平移变换)、实现源点云与目标点云的精准对齐(如图2所示)。通过连续帧配准实现实时位姿估计与环境建图,或通过模型与场景的配准完成物体识别与6D位姿估计,为智能体提供空间状态感知基础,是连接数字世界与物理交互的桥梁,广泛应用于SLAM、自动驾驶、AR/VR空间定位以及机器人导航等任务。
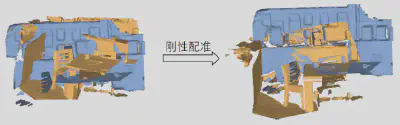
图2: 点云刚性配准示例。
然而,真实场景中的点云数据往往面临多重挑战:噪声干扰、密度不均、部分重叠(尤其是10%-30%的低重叠率场景)、点云之间变换差异大等。 与此同时,自动驾驶、实时SLAM等应用对CPU端的实时性、配准精度和环境鲁棒性提出了严苛的要求。现有点云刚性配准方法主要分为两类,各有缺陷:
1. 基于特征匹配的全局配准方法:这类方法通过构建旋转不变的特征描述子建立对应点,能够处理大尺度的空间变换,然而,受到点云噪声、部分缺失以及局部相似性等影响,初始的全局对应关系通常包含大量的错误点对。近年来,MAC等方法提出了基于最大团的对应点过滤方法,但其计算开销大,效率低;基于RANSAC的方法采样复杂度高,改进的方法又降低了准确性;而深度学习的方法依赖于大规模标注数据且泛化性受限。
2. 基于空间几何的局部配准方法: 这类方法在局部最近点算法的范式下进行改进,通过迭代的搜索最近点作为对应点和估计刚性变换,实现细粒度的局部对齐,尽管达到了局部精细化的匹配且运行速度快,但由于严重依赖良好的初始变换,在大变换差异的场景下容易收敛到局部最优,导致配准失败。
二、构建双空间联合优化框架
针对现有刚性配准方法难以兼顾大变换差异的鲁棒性、局部配准的准确性与算法的高效性的问题,该团队提出DualReg,一种特征空间与局部几何空间双空间的联合优化配准框架,其核心创新在于融合特征空间与几何空间的互补优势:
1. 特征空间: 利用FPFH, FCGF等旋转不变的特征描述子建立全局对应点,并提出基于RANSAC算法的高效精准过滤器,得到大变换鲁棒的可靠全局对应;
2. 局部几何空间:利用这些全局可靠对应点,构造局部几何代理点集,引入局部精细化几何约束提高匹配的准确性。
通过在统一优化框架中联合求解两类对应关系,实现从粗糙到精细的对齐。此外,框架中设计了高效的渐进式对应点过滤机制,快速剔除特征匹配中的错误对应,进一步提升整体效率。大量实验表明,DualReg在配准精度与计算速度上均展现出显著的综合优势。
三、核心技术解析:渐进式高效过滤及双空间优化
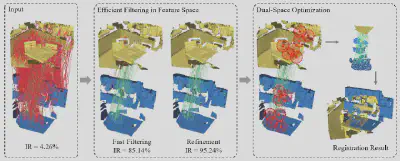
图3:DualReg的运行流程:从高效过滤到双空间联合优化。
为提高配准精度与速度,该工作将整个算法流程解耦为以下三个核心步骤:
● Step1:高效过滤,去伪存真。 面对初始匹配中高达90%以上的错误点对,DualReg引入了渐进式过滤机制。首先,它设计了一种单点RANSAC算法,利用长度一致性、法线一致性、对称性过滤等几何约束,快速筛掉大量明显的错误对应关系。随后引入基于概率加权采样的三点RANSAC细化模块,对剩余候选点进行精细化筛选,最终构造出一个高置信度的“锚点”集合。
● Step2:构建代理,化繁为简。 以这些高置信度的“锚点”为种子,DualReg在源点云和目标点云的局部邻域内分别提取邻域点集,构建出“几何代理点集”。由于锚点本身已足够可靠,其邻域天然具有比原始点云更高的重叠率,为引入精细的局部几何约束创造了理想条件。
● Step3:双空间协同优化,全局局部双保险。 该工作设计了一个新颖的双空间优化目标函数:它既保留了锚点对应的“特征空间约束”,确保对大范围变换的鲁棒性;又引入了几何代理点集之间的“最近邻对应约束”,通过局部几何信息实现更精准的对齐。这两项约束在一个统一的迭代优化框架内被联合求解,交替执行最近邻搜索和刚性变换估计,直至收敛。这种协同机制,使得DualReg即使在变换差异大、低重叠率、强噪声的极端场景下,依然能精准而稳健地完成配准。
四、结果展示
DualReg的性能在三个主流真实数据集(室内3DMatch/ 3DLoMatch、室外KITTI数据集)上得到了充分验证,并与当前最先进的方法(包括MAC、MAC++、TurboReg、PointDSC等)进行了全面对比。
如图4所示,在极具挑战的室内场景中,当其他先进方法出现明显错位或失败时,DualReg依然能实现精准、鲁棒的点云对齐。
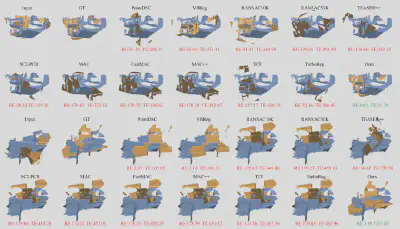
图4: 在3DMatch数据集上的定性比较结果:上两行基于FPFH特征,下两行基于FCGF特征,展示了DualReg与其他方法的配准效果。
● 精度实现领跑:在所有数据集上,DualReg在保持高配准率的同时,取得了最优的配准精度(如表1所示);
● 速度显著提升: 以KITTI数据集为例,与精度略低的MAC方法相比,DualReg实现了高达32倍的加速,为实时性要求严苛的SLAM和自动驾驶应用提供了新的解决方案。
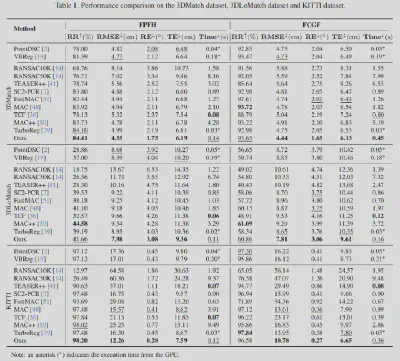
表1:DualReg在多个数据集上与SOTA方法的定量对比。
总结与展望
DualReg从三个维度实现技术创新:特征空间的高效离群点剔除、几何空间的代理点集构建、双空间联合优化的变换估计。该工作结合特征空间对应点与局部几何空间对应点的优势,实现了高效与精准的全局点云刚性配准。
尽管DualReg目前聚焦于刚性配准,但其“双空间协同”与高效过滤算法的思想可以推广至非刚性场景,基于团队在非刚性配准领域的深厚积累(如SPARE等工作),未来将实现从刚性到非刚性的统一配准框架。
论文发表
该工作已被计算机视觉顶级会议CVPR 2026录用。CVPR是计算机视觉与模式识别领域的顶级国际会议(CCF-A类),2026年录用率约为25.42%。
论文原文
论文标题:DualReg: Dual-Space Filtering and Reinforcement for Rigid Registration
作者: 李嘉怡1,要宇馨2,鲁秋航3,张举勇1
单位:中国科学技术大学1,香港城市大学2,中国科学院大学3
项目主页:
https://ustc3dv.github.io/DualReg/
相关工作
围绕点云精细化配准,张举勇课题组近年来开展了一系列系统性研究,通过引入鲁棒损失函数和精确几何度量,建立了对噪声和部分重叠具有高容忍度的优化框架。与此工作紧密相关的部分论文如下:
● 基于对称化点到平面距离的鲁棒非刚性三维配准(TPAMI 2025) SPARE: Symmetrized Point-to-Plane Distance for Robust Non-Rigid 3D Registration. Yuxin Yao, Bailin Deng, Junhui Hou, Juyong Zhang.
● 使用加速MM算法的快速鲁棒非刚性配准(TPAMI 2023) Fast and Robust Non-Rigid Registration Using Accelerated Majorization-Minimization. Yuxin Yao, Bailin Deng, Weiwei Xu, Juyong Zhang.
● 快速鲁棒迭代最近点算法(TPAMI 2022) Fast and Robust Iterative Closest Point. Juyong Zhang, Yuxin Yao, Bailin Deng.
● 一种用于点云配准的鲁棒损失函数(ICCV 2021) A Robust Loss for Point Cloud Registration. Zhi Deng, Yuxin Yao, Bailin Deng, Juyong Zhang.
● 用于鲁棒非刚性配准的拟牛顿求解器(CVPR, Oral Presentation 2020) Quasi-Newton Solver for Robust Non-Rigid Registration. Yuxin Yao, Bailin Deng, Weiwei Xu, Juyong Zhang.