GCL学术成果:CVPR2026-如何让点云去噪更智能?DSNet利用路径选择策略给出答案
近日,CVPR 2026 论文录用结果正式公布,中国科学技术大学数学科学学院GCL实验室和中国地质大学合作的研究成果 DSNet (Dynamic Skip Net) 成功入选。该工作聚焦“高保真、强鲁棒、可自适应”的点云去噪任务,提出了一种基于按需路由(Routing on Demand)的动态渐进式去噪新框架,突破了传统固定迭代流水线在非均匀噪声场景下易过平滑、计算冗余严重的瓶颈。
该方法通过法向相似度驱动的噪声判别机制与路径选择迭代策略,实现对不同区域噪声强度的精细感知与差异化处理,做到“干净区域少处理、噪声区域深处理”。在多项合成与真实扫描数据集上的实验表明,DSNet 在几何细节保留、噪声抑制效果与计算效率方面均取得很好的表现,为高质量三维重建与大规模3D感知系统提供了一种更高效、更智能的新思路。
【论文标题】Routing on Demand: DSNet for Efficient Progressive Point Cloud Denoising.
【作者】程筱茜1,肖冬1,李虎森1,刘郑2,陈仁杰1
【单位】中国科学技术大学1,中国地质大学2
问题背景
在自动驾驶、机器人导航和三维重建等领域,点云作为真实世界的“数字骨架”,其质量直接决定了机器感知的上限。然而,点云在采集过程中不可避免地受到传感器高斯噪声、环境异常值和几何畸变等多种噪声的干扰,且这些噪声往往在空间上呈现非均匀分布,严重影响下游任务的性能。因此,点云去噪成为确保数据质量的关键预处理步骤。
传统点云去噪方法主要基于几何拟合框架(如最小二乘拟合、双边滤波、拉普拉斯平滑等),依赖显式几何先验,缺乏处理复杂噪声的统计建模能力。基于深度学习的方法虽然通过从数据中学习鲁棒的特征表示取得了显著进展,但无论是单阶段方法还是渐进式迭代方法,现有框架大多采用统一的处理流程,对所有区域施加相同的去噪强度。这种"一刀切"策略未能考虑噪声分布的空间差异性:在低噪声区域产生冗余计算和过度平滑,导致精细几何细节丢失;在高噪声区域则去噪不充分,无法有效恢复几何结构。这同时损害了几何保真度和计算效率。
因此,一个具有挑战性的问题浮现出来:去噪模型是否能像经验丰富的修图师一样,自动判断哪些地方该“重磨皮”,哪些地方该“留细节”?
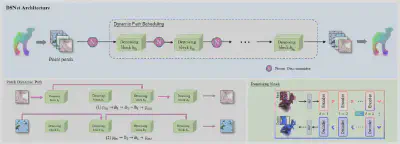
图1. 展示了DSNet的整体流程概览。
解决方案
为解决上述问题,本研究提出了动态跳跃网络(Dynamic Skip Net, DSNet),该方法将去噪任务从“固定流水线”提升为“自适应路径规划”任务。DSNet根据输入点云的噪声分布和几何特征,自适应地为每个局部区域规划去噪迭代路径,从而在去噪精度和计算效率之间实现更优的平衡。DSNet包含两个关键设计:
第一,基于法向相似性的噪声判别器。我们提出了一种新颖的法向相似性因子ρ,通过分析每个局部patch内法向偏差程度来量化噪声强度。该指标利用四次方惩罚项,对大偏差进行强惩罚,对小扰动保持鲁棒性。随后,通过反单调决策函数λ(ρ)将连续噪声评分映射到离散的去噪模块索引,实现动态路径调度,为不同噪声水平的区域选择不同的去噪路线。
第二,路径选择式迭代机制。 不同于传统固定顺序的推理范式,DSNet在每次迭代后重新评估残余噪声水平,并动态重新规划后续去噪路径。这一机制允许不同patch沿自适应路径进行处理,支持跨阶段跳跃推理:严重损坏的patch经历从强到弱的完整去噪序列;而较干净的patch可以跳过初始的强去噪模块,直接进入后续微调阶段,从而在保留精细特征的同时显著节省计算开销。
在网络架构上,每个去噪模块基于改进的U-Net结构,具备可调节的编码器-解码器,融合图卷积和注意力聚合机制以处理复杂几何结构。同时,我们设计了多阶段训练策略,结合中间监督和几何一致性约束,确保渐进去噪过程中的平滑性和结构稳定性。
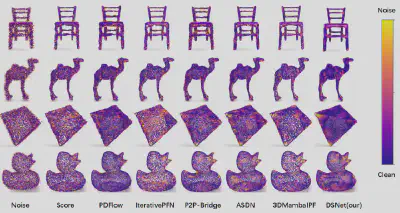
图2. 展示了10K分辨率、3%高斯噪声条件下各方法的逐点P2M距离可视化对比。
实验结果
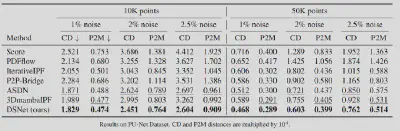
合成数据对比: 在PUNet数据集上,我们在10K和50K两种分辨率以及1%、2%、2.5%三种噪声水平下,与Score-Based Denoising、PDFlow、IterativePFN、P2P-Bridge、ASDN、3DMambaIPF等多种先进方法进行了全面比较。DSNet在所有设置下均取得了最低的Chamfer Distance(CD)和Point-to-Mesh(P2M)误差。例如,在50K点、2.5%噪声的高难度条件下,DSNet的CD为0.762、P2M为0.514,显著优于其他方法。
表1. 展示了在PUNet数据集上与其他去噪方法的定量结果对比。
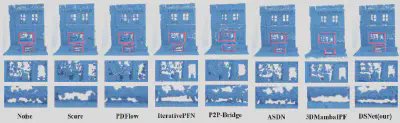
真实扫描数据对比: 在Paris-Rue-Madame真实街景数据集和Kinect扫描数据集上的定性实验表明,DSNet在有效去除噪声的同时保持了平滑、连续的表面和清晰的结构边界,在噪声抑制与细节保留之间达到了平衡。
图3. 展示了在真实场景RueMadame数据集上与其他方法的可视化对比。
技术贡献
本项工作的主要贡献包括:
● 提出了一种新颖的基于法向相似性驱动的噪声判别器,能够有效量化局部几何噪声程度,为不同噪声强度区域的动态路径规划提供可靠指导。
● 引入了创新的路径选择式迭代机制,通过基于残余噪声评估自适应调整推理路径,实现按需去噪和高效的跨阶段跳跃式去噪,避免冗余计算。
● 设计了融合中间监督和几何一致性约束的多阶段训练策略,确保渐进去噪过程中的平滑性和结构稳定性。
● 在多个点云去噪基准数据集上的全面实验表明,DSNet在噪声抑制、几何恢复和计算效率方面均达到了先进的性能。
论文发表
该工作已被计算机视觉顶级会议CVPR 2026录用。CVPR是计算机视觉与模式识别领域的顶级国际会议(CCF-A类),2026年录用率约为25.42%。
论文原文
Xiaoqian Cheng, Dong Xiao, Husen Li, Zheng Liu, Renjie Chen. Routing on Demand: DSNet for Efficient Progressive Point Cloud Denoising. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026.