GCL学术成果:IEEE TPAMI 2025-高效高精度非刚性配准
【论文标题】SPARE: Symmetrized Point-to-Plane Distance for Robust Non-Rigid 3D Registration
【作者】要宇馨1,3,邓柏林2,侯军辉3,张举勇1
【单位】中国科学技术大学1,卡迪夫大学2,香港城市大学3
背景与问题
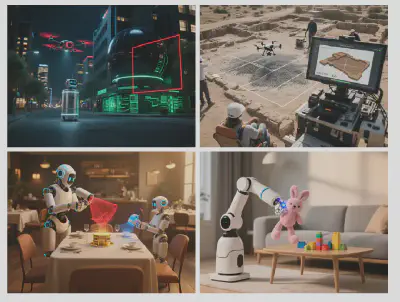
精准感知与高效处理空间信息,是实现空间智能应用自动化和智能化的核心能力。无论是在卫星遥感、无人机测绘、机器人导航还是增强现实(图1)等场景中,都离不开对三维空间的高精度建模与分析。作为空间智能的关键基石,三维配准技术将不同时间、不同视角或不同传感器获取的点云、图像及模型数据,精准对齐至统一坐标系,从而实现多源数据的无缝融合与一致性表达。当前,随着传感技术的飞速发展、计算硬件性能的大幅提升以及算法的持续优化,三维配准技术正不断突破精度与适用场景的边界,成为推动空间智能应用向更广领域、更高精度迈进的核心驱动力。
三维配准技术的核心挑战在于如何在未知点对应关系的条件下,精准求解相对变换。根据物体形变特性,配准任务可分为两类:
● 刚性配准:处理平移旋转不变的物体(如场景中的家具、建筑等)
● 非刚性配准:处理动态形变物体的空间对齐(如运动生物、铰链式的机械结构、软体物质等)
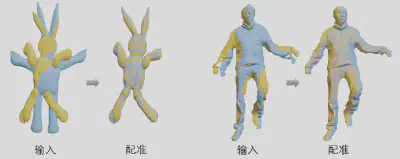
由于需对复杂形变进行建模,非刚性配准面临更为严峻的技术挑战(图2)。其核心难点在于如何构建能够适应多样化变形的变形场,以及在形变条件下仍能建立稳定、准确的对应关系。突破非刚性配准的关键瓶颈,将为下一代空间智能应用提供更精准、更实时的感知能力,推动技术在复杂动态场景——如自动驾驶、柔性机器人、活体医疗检测等领域的广泛应用与落地。
传统非刚性配准方法长期面临三重挑战:
● 数据质量缺陷:扫描中的噪声与缺失易导致配准偏差;
● 复杂异构形变:曲面结构扭曲削弱特征对应可靠性,而形变多样性(如近刚性变化、布料褶皱、肌肉运动等)也加大基于先验的对应点学习难度;
● 效率与精度难以兼顾:不准确的曲面距离近似与冗余形变自由度,使高精度与高效率无法同时实现。
解决方案
针对全局对应不可靠的问题,我们转向局部配准范式,以降低初始化依赖、聚焦精细对齐。配准效果高度依赖于误差度量方式,因此引入对称点对面距离,借助其近似二阶收敛特性提升效率。但该方法仍面临三大挑战:
● 复杂形变下法向估计困难;
● 高自由度变形易产生“伪对齐解”;
● 噪声、离群点和局部缺失降低度量有效性。
为此,本文提出SPARE方法,通过三项创新系统性应对上述问题:
√ 法向估计优化:结合尽可能刚体正则化假设,联合优化局部形变约束与对称距离,提升法向准确性;
√ 消除冗余自由度:采用基于变形图的层级粗对齐策略,保留源曲面特征的同时降低优化自由度,杜绝伪对齐;
√ 噪声自适应抑制:设计基于几何一致性的自适应权重机制,动态抑制不可靠对应点,增强鲁棒性。
此外,为有效求解高度非线性优化问题,我们设计了一种适配的求解算法,将复杂优化分解为多个可闭式求解的子问题,确保高效收敛,并有效规避局部最优解的困扰。通过上述改进,SPARE方法为非刚性配准中的法向估计、自由度优化及噪声干扰等问题提供了系统化解决方案。更多技术细节详见论文:https://arxiv.org/abs/2405.20188。
实验结果
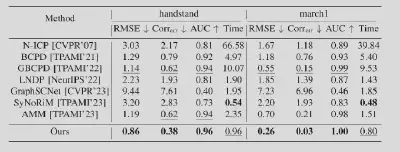
提出的方法在合成与真实数据集上均实现了高的配准精度,如图3,图4与表1,展现了所提出方法在配准精度与速度方面的优越性。


技术贡献
-
提出基于鲁棒点到平面距离和局部刚性正则化的精配准算法,大幅提升精度并降低初值依赖;
-
设计由粗到细的层级化变形建模,实现高效求解,避免局部最优,同时精确对齐局部曲面;
-
通过交替优化和设计代理函数,简化复杂问题求解,显著提升效率;
-
提出的方法在所有数据集上均实现了显著领先的配准精度(例如表1中,match1序列的RMSE误差仅为SOTA方法的一半),同时运行速度全面优于所有基于优化的对比方法。
论文发表
该工作已被IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) 接收。
论文原文
Yuxin Yao, Bailin Deng, Junhui Hou, Juyong Zhang. SPARE: Symmetrized Point-to-Plane Distance for Robust Non-Rigid 3D Registration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025.
论文主页
https://github.com/yaoyx689/spare
系列工作
近年来,张举勇教授课题组在三维配准方向展开了系列研究工作,包括:
- 高效高精度刚性配准算法,提出了新的优化配准度量函数与优化方案,显著提升了刚性配准精度与速度。
- Zhang et al. Fast and Robust Iterative Closest Point. TPAMI, 2022.
Code: https://github.com/yaoyx689/Fast-Robust-ICP
- 用于鲁棒局部配准的非刚性配准算法,设计了对曲面网格质量极小依赖的变形图建图策略,及针对问题特性的建模与高效求解。
- Yao et al. Quasi-Newton Solver for Robust Non-Rigid Registration. CVPR 2020. Oral presentation.
Code: https://github.com/Juyong/Fast_RNRR
- Yao et al. Fast and Robust Non-Rigid Registration Using Accelerated Majorization-Minimization. TPAMI 2023.
Code: https://github.com/yaoyx689/AMM_NRR
- 最近,针对全局刚性配准问题,我们提出了在特征空间/局部几何双空间的优化框架DualReg[1],在配准精度与计算效率方面取得了显著提升。在不损失配准精度情况下,我们方法的计算速度为MAC[2]方法的32倍。
[1] Li et al. DualReg: Dual-Space Filtering and Reinforcement for Rigid Registration. https://arxiv.org/abs/2508.17034
[2] Zhang et al. 3D Registration with Maximal Cliques. CVPR 2023, best student paper award.